

Summary
Multi-robot system research in IMCL can be divided into two parts:
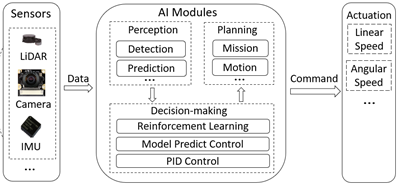
- Distributed Reinforcement Learning for Autonomous Cooperation: We aim to develop intelligent robots that can learn cooperative strategies from interactions with others. Specifically, we investigate the challenges of learning cooperation in a distributed way, such as partner modeling, partial observation problems, and large-scale multi-robot systems.
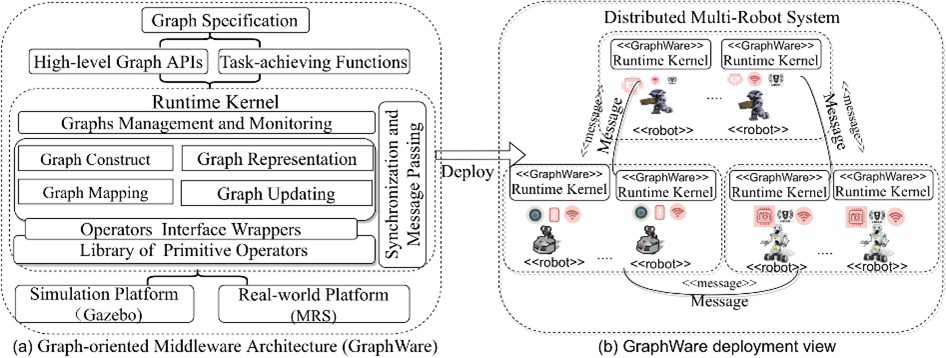
- Middleware and Distributed Coordination of Multi-Robot Systems: Robotic middleware has become the key to reducing the complexity of multi-robot application development, but existing work still has limitations in controlling multiple robots to perform missions cooperatively. We propose GraphWare, a novel middleware that provides a graph-oriented programming abstraction and its underlying runtime kernel for programming and building multi-robot cooperation applications.
Details
 Distributed Reinforcement Learning for Autonomous Cooperation |
 Middleware and Distributed Coordination of Multi-Robot Systems |