

Middleware and Distributed Coordination of Multi-Robot Systems
Overview
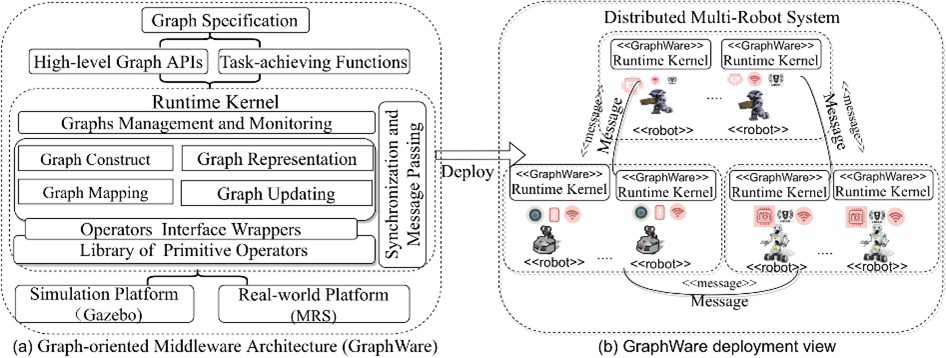
Robotic middleware has become the key to reducing the complexity of multi-robot application development, existing works still have limitations in controlling multiple robots to perform missions cooperatively. We propose GraphWare, a novel middleware that provides a graph-oriented programming abstraction and its underlying runtime kernel for programming and building multi-robot cooperation applications. We aim to develop robotic middleware that can reduce the complexity of multi-robot application development.
Project Framework
Achievements
- Jinlin Chen, Jiannong Cao, Zhixuan Liang et al., GraphWare: A Graph-Oriented Middleware Enabling Multi-Robot Cooperation, submitted to Journal of Software and Systems
Members
Jinlin Chen, Zhixuan Liang, Huafeng Xu.